Das haben wir von Version 1 übernommen: Das haben wir von Version 1 übernommen:
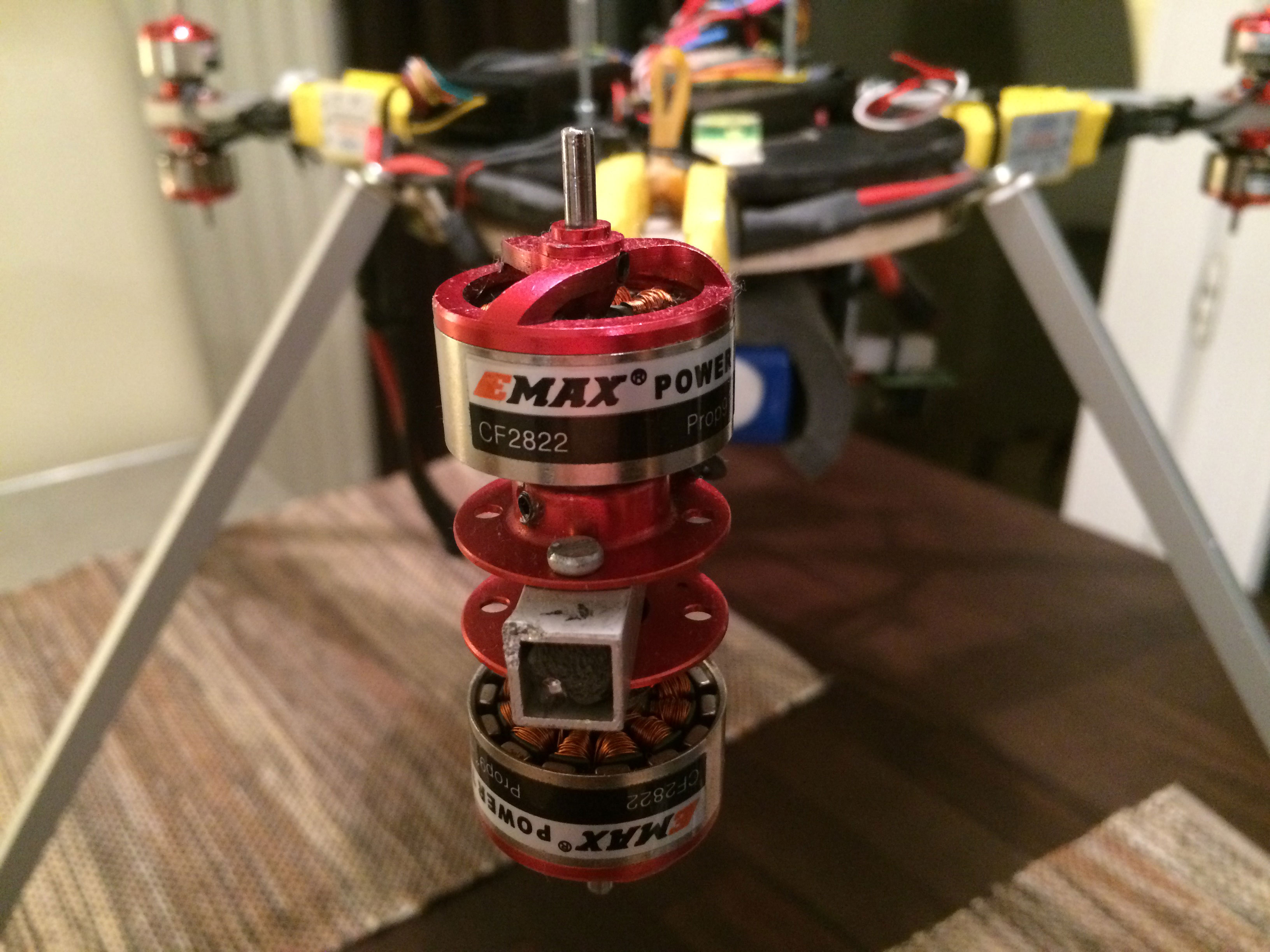
Brushless Motoren (BLM) EMAX CF2822
1200 RMP/V (Umdrehungen pro Volt)
Größe: 22mm x 10mm
Achsendurchmesser: 3mm
Gewicht: 39g / Stück
Die Motorwelle wurde gekürzt (der Stab der oben rausguckt), so dass der Propeller direkt auf dem Motor sitzt.
Motorregler
(Electronik Speed Control / ESC) haben eine Leistung von
Eingangsspannung: 2 oder 3 Zellen LiPos oder 5-9 Zellen NiCd/NIMh Akkus
BEC: 1A / 5V (Linear mode).
Max Speed:
210,000 rpm for 2 Poles BLM
70,000 rpm for 6 poles BLM,
35,000 rpm for 12 poles BLM.
Maße: 45mm (L) x 24mm (W) x 11mm (H).
Gewicht: 25g / Stück

Akkus
Die Akkus sind LiPos mit 5000 mAh, 11,1 V (3S) und 30C
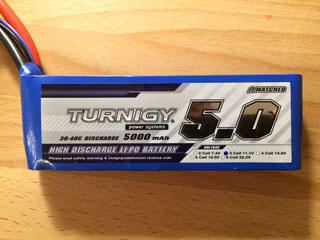 LiPo 3S mit 5000mAh LiPo 3S mit 5000mAh
|
LiPo = Lithium Polymer
3S = 3 Zellen. Eine Zelle hat 3,7 V. 3S entspricht also 11,1 V.
5000 mAh = Kapazität des Akkus (= 5 Ah)
Dies sind bei 11,1 V = 55,5 Wh.
30C bedeutet, dass der Akku maximal das 30 fache seiner Kapazität an Strom abgeben kann.
Also 30 x 5000 mA = 150.000 mA = 150 A (bei 11,1 V). Dies sind 1665 Watt.
Oder anders gesagt: Man könnte in nur 2 Minuten die ganzen 5000 mAh aus dem Akku ziehen! Dies ist die große Stärke von LiPo Akkus.
Ein Akku wiegt 373 g.
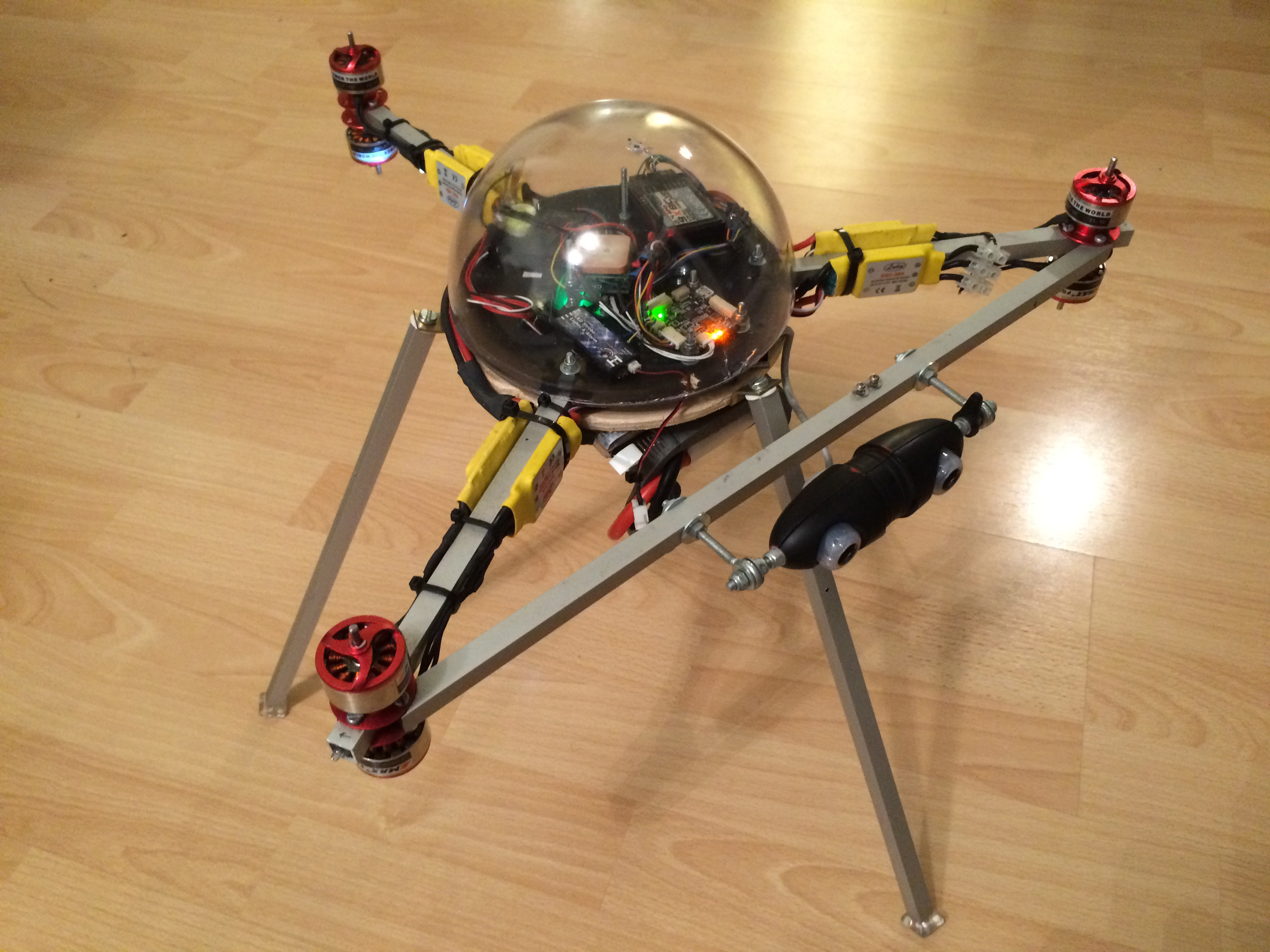
 Die Propeller Die Propeller
Die Propeller haben einen Durchmesser von 10" (= 25,4 cm) mit einer Steigung von 4,5" (Typbezeichnung 1045)
Das sind die passenden Propeller Adapter (Prop Saver) zum Schrauben.

 3D Kamera 3D Kamera
Diese Kamera ist von Minorou. Die erste konsumer 3D Webcam auf dem Markt. Ist schon ein Paar Jahre alt, aber es gibt gute Linux Unterstützung.
Der Abstand der Kameras ist 60 mm und entspricht fast dem durchschnittlichen Augenabstand von 65 mm (Mann) und 62 mm (Frau).
Das Foto mit der roten Kamera ist der Lieferzustand.
Im Copter ist sie schwarz und nur der obere Teil wurde montiert. Außerdem ist sie so drehbar montiert, dass vorwärts- und Rückwärtsbewegungen mittels eines Servos kompentiert werden können (Servo nicht im Bild).

Technische Daten:
VGA CMOS Sensor
Maximale Auflösung 800×600
Maximale Framerate 30 fps
L/R shutter nicht synkronisiert (Max Zeitversatz 16.5 ms)
Manueller Focus (von 10 cm bis unendlich)
Sichtbereich 42°
Das Hauptproblem ist, dass die Bilder, die von den beiden Kameras kommen, nicht synkronisiert sind. Also nicht zum selben Zeitpunkt aufgenommen werden. Durch den Zeitversatz werden die Berechnungen des 3D Bildes verschlechtert oder sogar unmöglich bei schnellen Bewegungen.
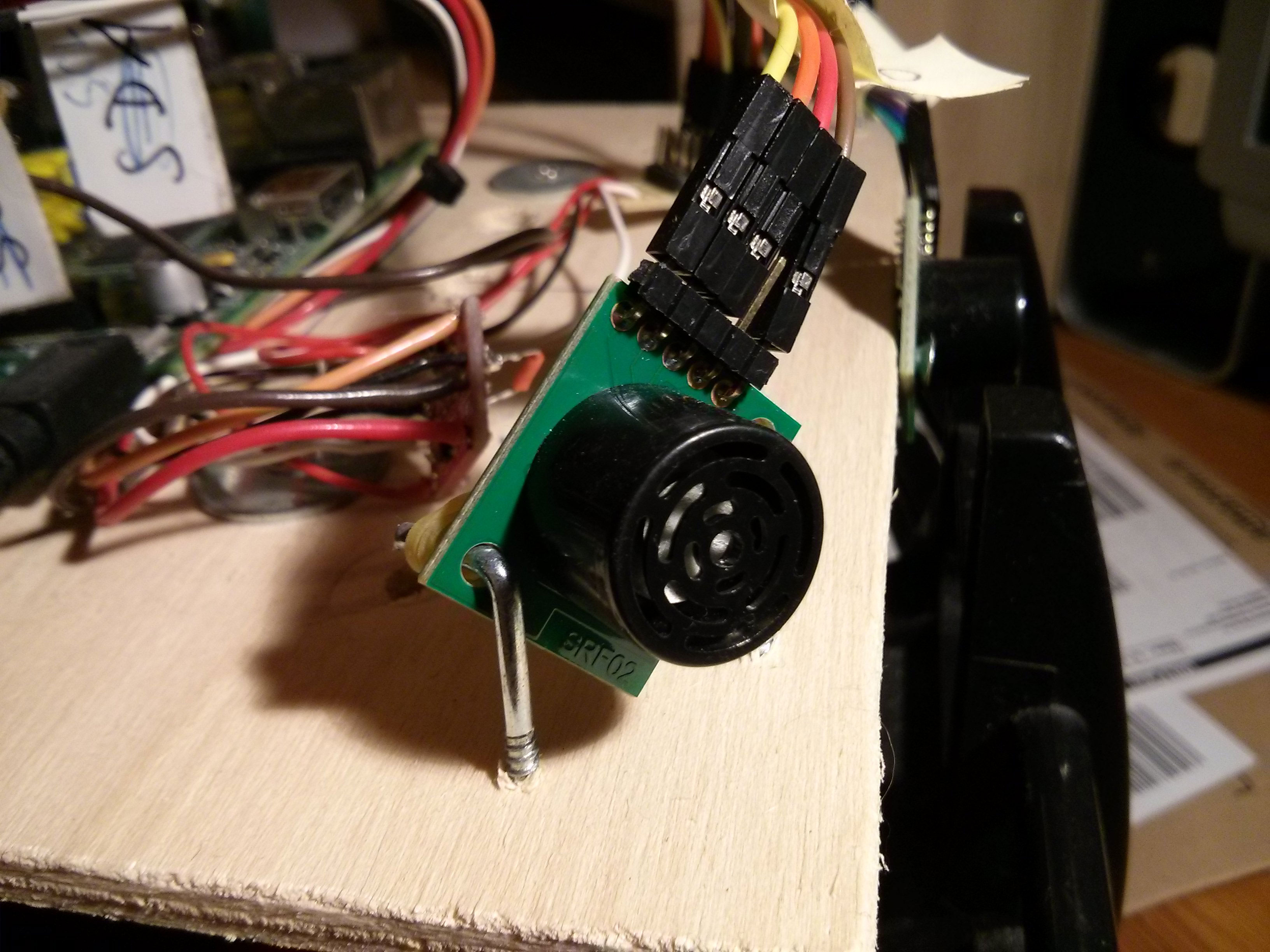
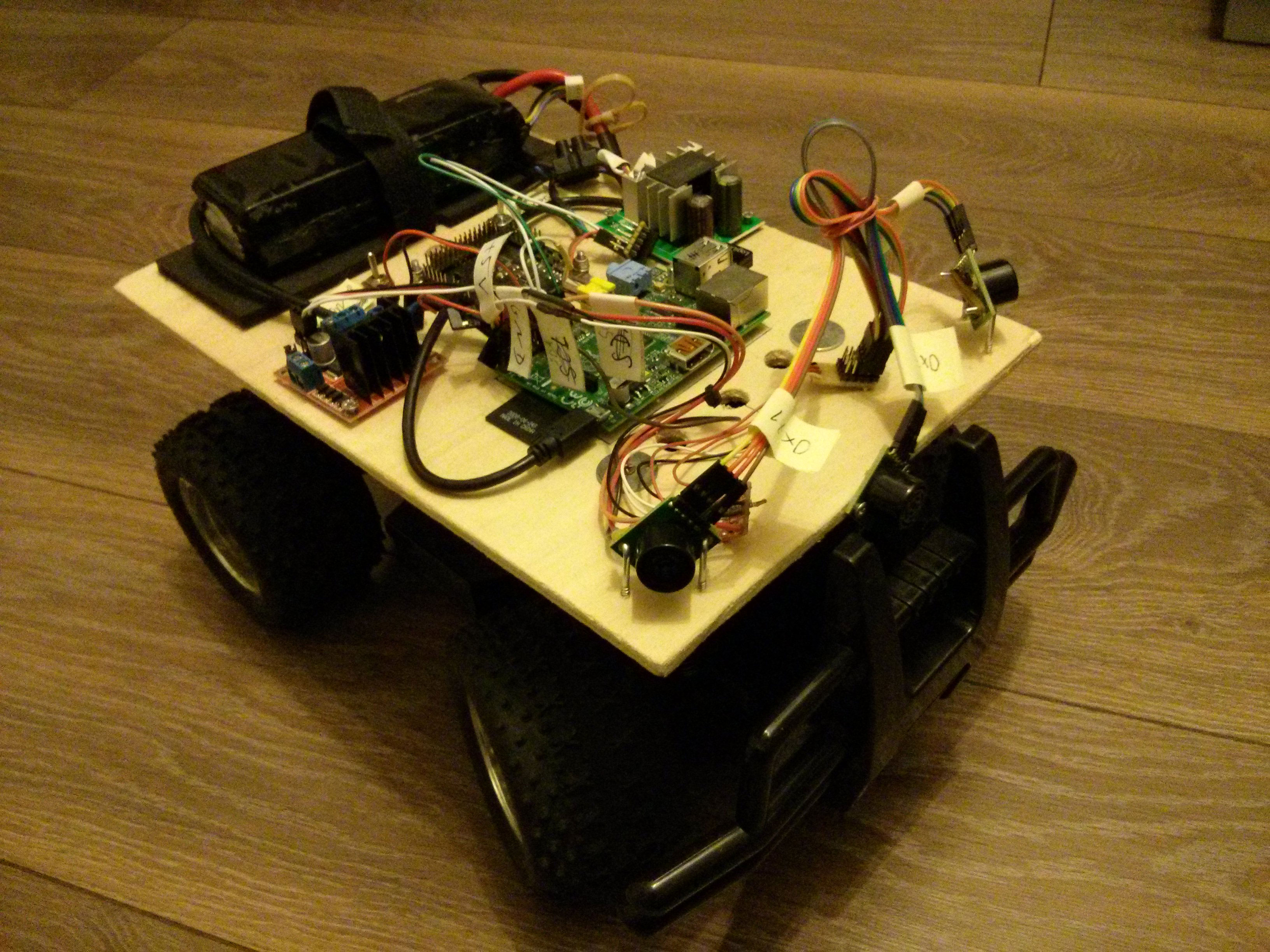
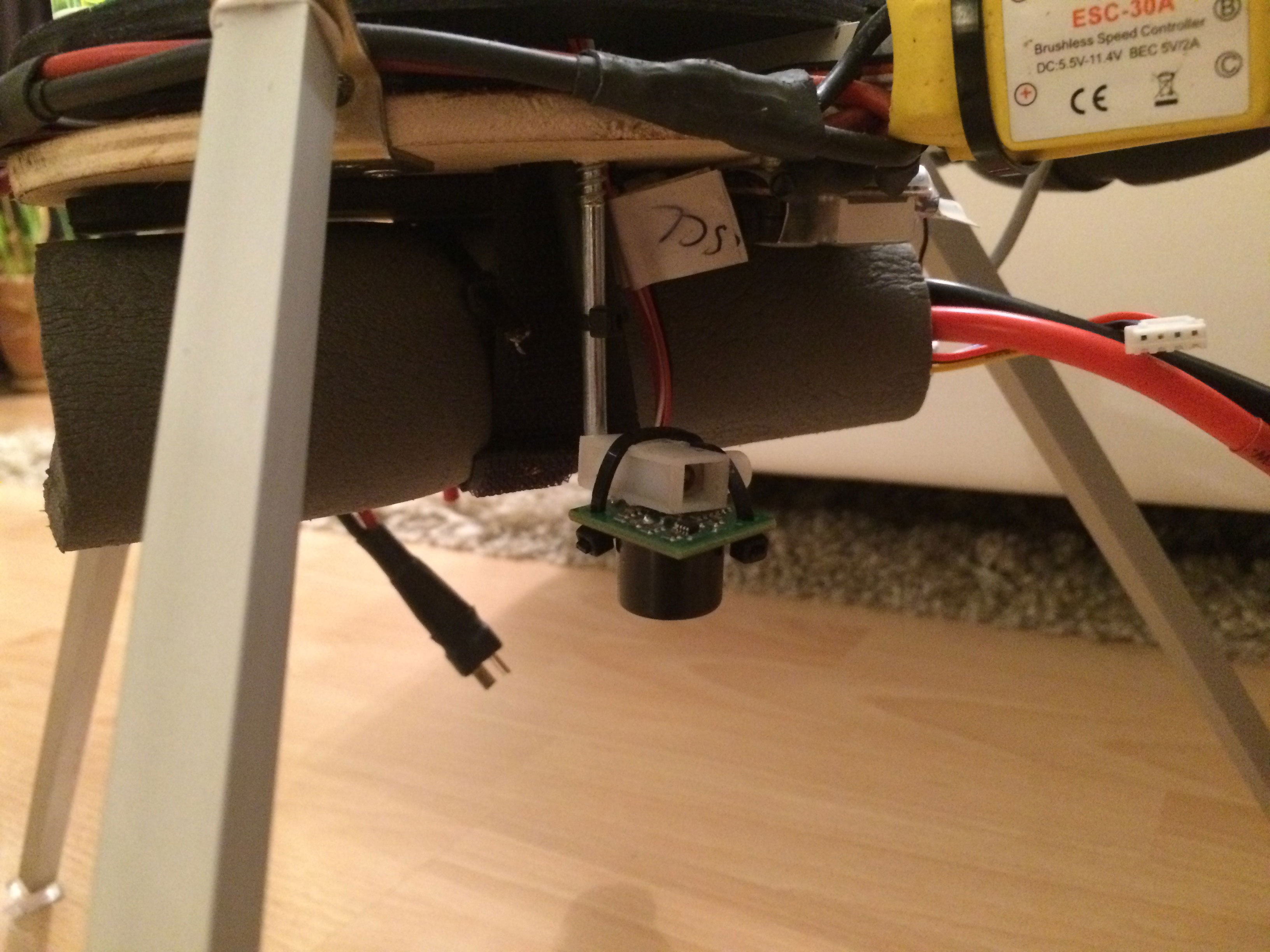
Ultraschall-Sensoren
 Die Typbezeichnung des Sensors ist SRF02. In dem schwarzen Gehäuse sind sowohl der Ultraschallsender als auch der Empfänger platzsparend untergebracht. Der Sensor wird über I²C angesprochen. Über I²C ist es einfach mehrere Sensoren an eine I²C Leitung zu hängen und nacheinander anzusprechen. Die Typbezeichnung des Sensors ist SRF02. In dem schwarzen Gehäuse sind sowohl der Ultraschallsender als auch der Empfänger platzsparend untergebracht. Der Sensor wird über I²C angesprochen. Über I²C ist es einfach mehrere Sensoren an eine I²C Leitung zu hängen und nacheinander anzusprechen.
Technische Daten:
Eingangsspannung: 5V
Stromverbrauch: 4mA
Frequenz : 40KHz
Messbereich: 15cm - 6m
Analoge Verstärkung: Automatische 64 stufige Verstärkung
Anschluss über I2C Bus oder seriellen Bus
bis zu 16 Sensoren an jeden Microcontroller oder UART Schnittstelle
Automatische Einstellung: Keine Kalibrierung notwendig
Einheiten : Abstand wird in uS, mm oder inches angegeben
Gewicht: 4.6gr
Größe : 24mm x 20mm x 17mm
Dosenlibelle
Eine Dosenlibelle ist eine 2-dimensionale Wasserwaage. Sehr praktisch um bei der Kalibrierung den Copter genau waagerecht aufzustellen.

|